TECHNOLOGY
Colony Count Image Processing Technology
※ Joint Patent-Pending
Regarding the colony counting process, the processing with the initial AI model released in August 2018 had implemented counting technology image processing that combines
"image processing" and "machine learning (Deep Learning)" for colony position detection.
In the AI model released in July 2023, object detection AI network (machine learning model) [YOLOv4] that processes position (area) detection and class classification in one network is used as a backbone and implemented as a hard-tuning AI enabling business use by repeated inference verification tests specializing in colony detection (counting) .
The object detection AI network [YOLOv4], which is called a real-time object detection algorithm and stands for "You Only Look Once” have maximized the performance and contributed to the accuracy and processing speed of colony counting by utilizing the following characteristics,
“Single-shot object detection characteristics”
“Algorithm strong for real-time detection”
“Processing speed is a great advantage”
Please feel free to use it and experience it.
*Depending on the target image, a counting error of about 3% may occur when compared with visual counting.
Processing by object detection model
Input
image file
Object detection
network model

Predict position
and class
* Colony inference by object detection model using deep learning

Technology and System Integration Supported
by Hitachi Solutions, Ltd.
Object detection accuracy metrics
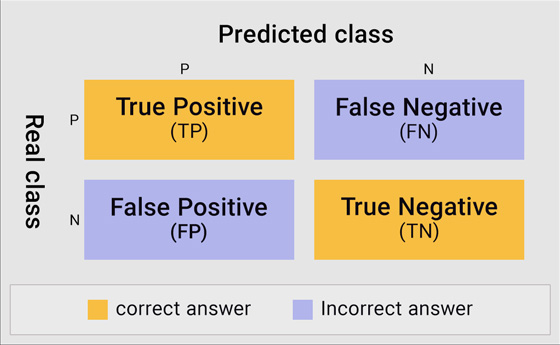
(Precision): It indicates what percentage of the positive predictions were correct.
(Recall): It indicates what percentage of the cases that were really positive were judged as positive.
Precision = TP/(FP+TP)
Recall = TP/(FN+TP)
(F-measure): Harmonic mean of precision and recall.
F-measure = 2 x Precision x Recall / (Precision + Recall)
[ Inference image of human and car object detection from images ]
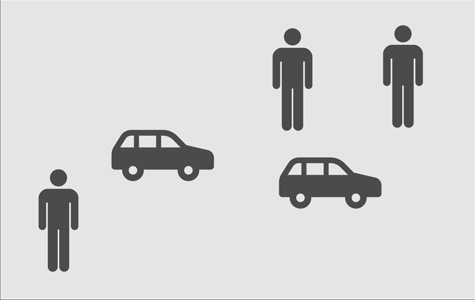
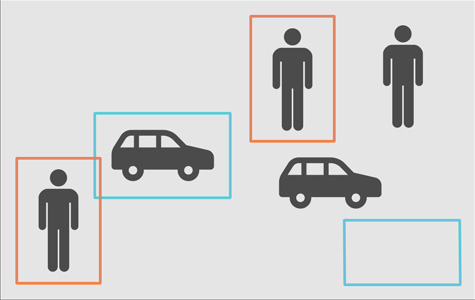
- Inference of human object detection -
Precision = 2 /(0+2) = 100%
Recall = 2 /(1+2) = 67%
F-measure = 2*1*0.67/(1+0.67) = 80%
- Inference for car Object Detection-
Precision = 1 /(1+1) = 50%
Recall = 1 /(1+1) = 50%
F-measure = 2*0.5*0.5 /(0.5+0.5) = 50%